

多臺空壓機連鎖控制的目的及發(fā)展趨勢
多臺空壓機連鎖控制的目的及發(fā)展趨勢
一個壓縮空氣系統(tǒng)使用多臺空壓機并聯(lián)運轉(zhuǎn)是相當(dāng)普遍的配置,但是使用多臺空壓機的壓縮空氣系統(tǒng)仍然會面臨以下的困擾及風(fēng)險:
---用氣量不穩(wěn)定,增加一臺空壓機運轉(zhuǎn)可能造成能源的浪費,減少一臺空壓機運轉(zhuǎn)又可能使風(fēng)量不敷使用及壓力下降;使用人工來照顧開停機又嫌浪費人力,同時還是有反應(yīng)不及的可能性發(fā)生。
---異常造成停機的現(xiàn)象是非常難以預(yù)期的,更難掌握備機能夠?qū)崟r的投入運轉(zhuǎn)。
---既不希望運轉(zhuǎn)中的空壓機同時泄載又期望每一臺空壓機的負(fù)荷量能夠平均,兩者確實很難兼顧。
---用氣量的波動極難掌握,又不希望頻頻的開關(guān)機。停機后在轉(zhuǎn)動尚未完全靜止之前又立刻再起動,還可能造成機械上的問題。
一切都自動化當(dāng)然是很理想的境界,如果能徹底的消除以上的困擾,則更為理想,但是事實與理想往往有相當(dāng)?shù)木嚯x;茲將兩種具代表性的連鎖控制分別闡述如下:
早期的多臺連鎖控制是將每一臺空壓機分別加裝一組壓力開關(guān)PS2(有別于控制負(fù)載/卸載的壓力開關(guān)PS1),以及起動與停機回路相并聯(lián)與串聯(lián),這也是最簡單的一種連鎖控制方法。當(dāng)系統(tǒng)壓力持續(xù)下降到PS2的設(shè)定點時,代表運轉(zhuǎn)中的空壓機供氣不足(此設(shè)定點要低于PS1的下限設(shè)定點),備機要自動的起動及負(fù)載。當(dāng)系統(tǒng)壓力開始上升并觸及PS1的上限設(shè)定點時,備載機組會自動的卸載并立即作動一個延遲繼電器。在延遲繼電器完成計時之前,如果仍然沒有負(fù)載時則會自動的停機,停機后的另一個延遲繼電器沒有完成計時之前不能再起動。此外,在設(shè)計的細(xì)節(jié)上還得考慮異常停機不能再起動以及控制系統(tǒng)在正常停機后自動復(fù)歸 (Auto Reset)的功能。由控制邏輯圖4.1表示起動/停機的順序如下(P1h2代表2號空壓機的上限/卸載壓力,P112代表2號空壓機的下限/負(fù)載設(shè)定壓力,P2-3代表3號空壓機的自動起動壓力,依此類推):
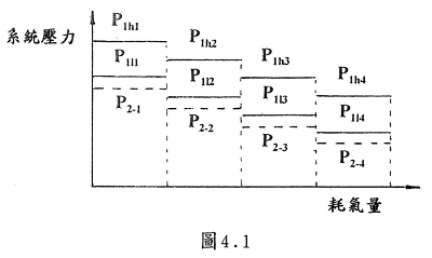
從邏輯圖4.1上,明顯的看出系統(tǒng)壓力呈階梯狀,為了顧及最后一臺空壓機的起動壓力不得低于系統(tǒng)壓力的允許下限以及自動起動/停機順序的間隔而不得不提高1號空壓機的壓力設(shè)定。如果每個壓差間距為5PSI,上下限之間的差距在使用四臺空壓機的系統(tǒng)中就可能高達30PSI,能源的浪費當(dāng)然會相當(dāng)可觀。
在大部份的壓縮空氣系統(tǒng)中很少有像上述的特殊案例,用氣量的波動高達70~80%或以上。因此,可以將上述設(shè)計予以修改為自動/手動起動的可選擇模式,部份的空壓機以人工起動/停機,而另外一部份空壓機則處于自動起動/停機的狀態(tài),如此可以大幅度的降低上下限壓力的差距,也更適用于超過四臺空壓機以上的系統(tǒng)。
由于電子科技的日新月異,傳統(tǒng)的控制盤已逐漸的被微電腦(Microprocessor)所取代。程序化的控制不僅讓操作、故障檢修等工作更簡易而且其擴充功能的能力也更強,還可以藉助個人計算機、可程控器 (PLC)來執(zhí)行多臺空壓機的連鎖自動控制。而各廠商的設(shè)計不盡相同,很難逐一剖析其差異性,一般而言設(shè)計的著眼點不外乎:
(一). 自動起動/停機及負(fù)載/卸載的功能。
(二). 起動/停機的順序定期的自動更替。
(三). 可選擇先起動后停機或先起動先停機的方式讓各臺空壓機勞逸均衡。
(四). 依需要可選擇冷機狀態(tài)或暖機狀態(tài)(潤滑油泵、冷卻水或其它附屬配備均已在運轉(zhuǎn)中)時的自動起動。
(五). 無論使用多少臺的空壓機都能自動的保持兩個壓差間距,而能讓所有的空壓機逐一的投入運行。
(六). 具有節(jié)流特性的空壓機可以使用每一臺運轉(zhuǎn)中的空壓機同步節(jié)流,無形中讓總節(jié)流范圍因而擴大數(shù)倍。
(七). 以上自動控制所需要的設(shè)定都可以在控制室中由操作員以鍵盤鍵入的方式更改,讓極難掌握的耗氣波動變化得以較容易的克服其困難度。
(八). 可以從控制室中輔以人工遙控起動/停機、負(fù)載/卸載及更改控制方式。
采購:多臺空壓機連鎖控制的目的及發(fā)展趨勢
聯(lián)系我們

電話:400-966-0620
手機:15001822509
傳真:02167743036
郵箱:15001822509@139.com
工廠地址:無錫新區(qū)長江南路
辦公地址:上海市金山區(qū)楓涇鎮(zhèn)興坊路959號